
Robots like more legs on bumpy routes. Two-legged balancing is harder than four-legged. What if you had many legs like a centipede? A robot with multiple, connected legs can easily climb over cracks, hills, and uneven surfaces without extensive sensor systems, according to Georgia Institute of Technology researchers. The journal Science published their findings this week.
The team modeled these creepy insects’ movements. In this new study, they created a framework for operating this centipede-like robot based on mathematician Claude Shannon’s communication theory, which suggests breaking a signal into discrete, repeating units to avoid noise.
Researchers anticipate additional limbs will reduce sensors.
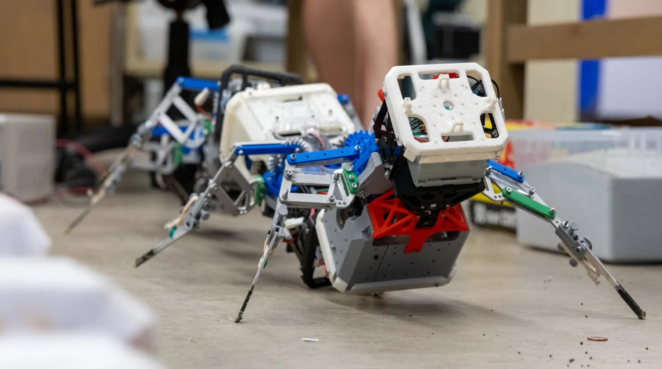
“We were inspired by this theory, and we tried to see if redundancy could help in matter transportation,” physics postdoctoral researcher Baxi Chong stated in a news release. Their robot is a model train with two legs on each section that can “walk.”
After being directed to move somewhere, these legs would touch a surface and convey topography information to the other parts, which would change motion and position. The researchers tested its walking, speed, and performance on grass, bricks, and other hard surfaces in real-world and computer trials.
“Our framework codifies the benefits of redundancy, which lead to locomotor robustness over environmental contact errors without sensing,” the researchers concluded. This contrasts with the current paradigm of contact-error prevention in conventional sensor-based closed-loop controls that use environmental visual, tactile, or joint-torque information to adjust robot dynamics.
Six, 12, and 14-legged robots repeated the experiment. The researchers seek to identify the best number of legs for their centipede-bot to move smoothly and cost-effectively.
“Many sensors are needed to control an advanced bipedal robot in real time,” Chong stated. In search and rescue, Mars exploration, and tiny robotics, a robot with limited sensing is needed.